Se define el estado local de un proceso en un momento dado , como una tupla con el valor de todas las variables.
Se define el estado global es la unión de todos los estados locales del sistema.
Máquina de Estados
En una máquina de estados, el estado en todo momento está dado por un estado anterior, y un evento que lo modifica. Es importante que las transiciones sean determinísticas, esto permite volver hacia atrás en el tiempo y continuar con la ejecución, volviendo al estado actual.

Hay que analizar que el estado del sistema sea válido o inválido.
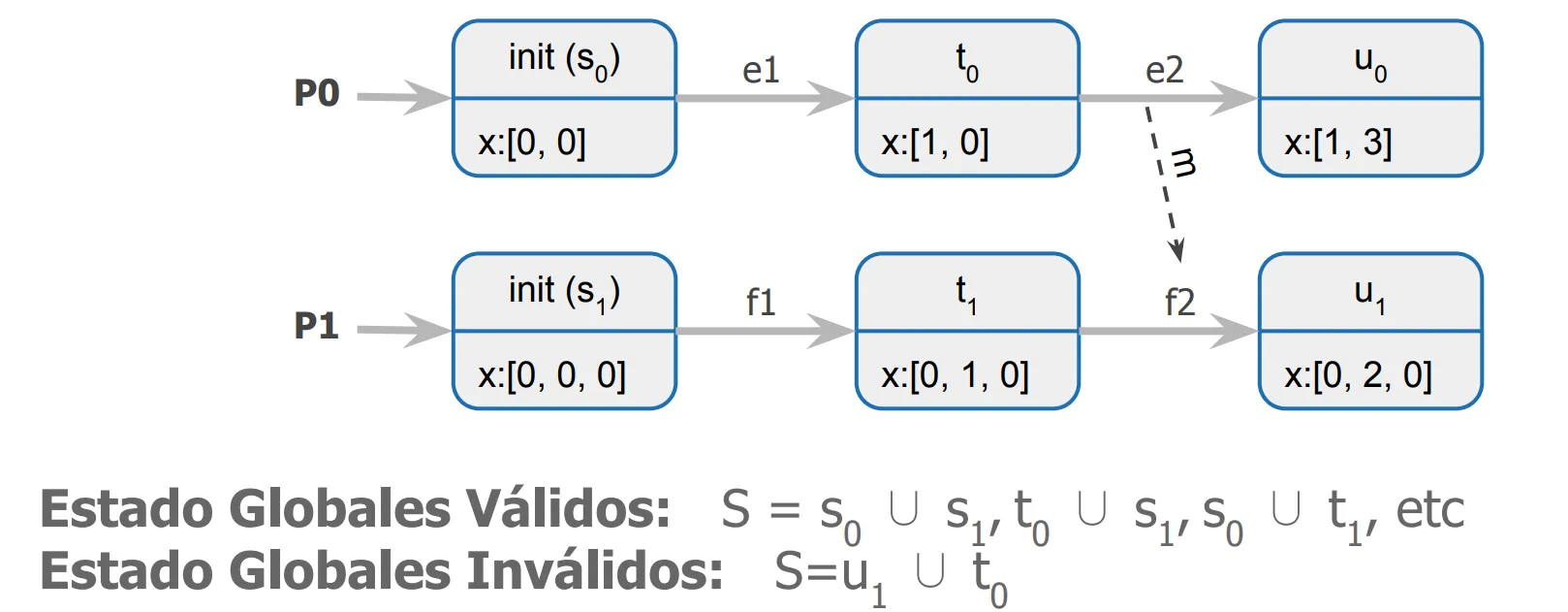
En este ejemplo, el estado es válido, pero el estado no lo es, puesto que depende del mensaje enviado por el evento , que ocurrió luego de .
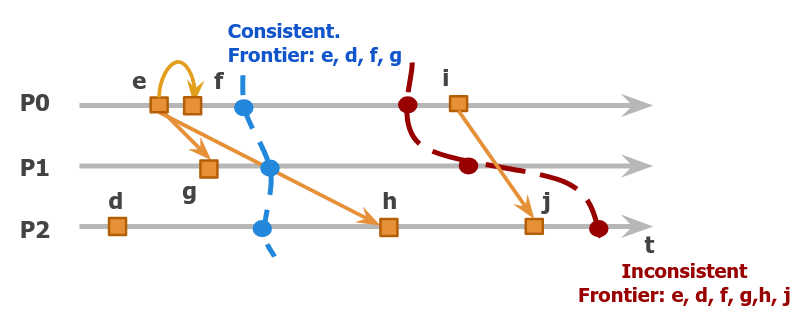
Historia y Corte
Se define historia o corrida, como la secuencia de todos los eventos procesados por un solo proceso .
Se define corte como el subconjunto de historias de todos los procesos hasta cierto evento de cada proceso.
Se dice que un corte es consistente si por cada evento que contiene, también contiene a aquellos que ocurren antes:
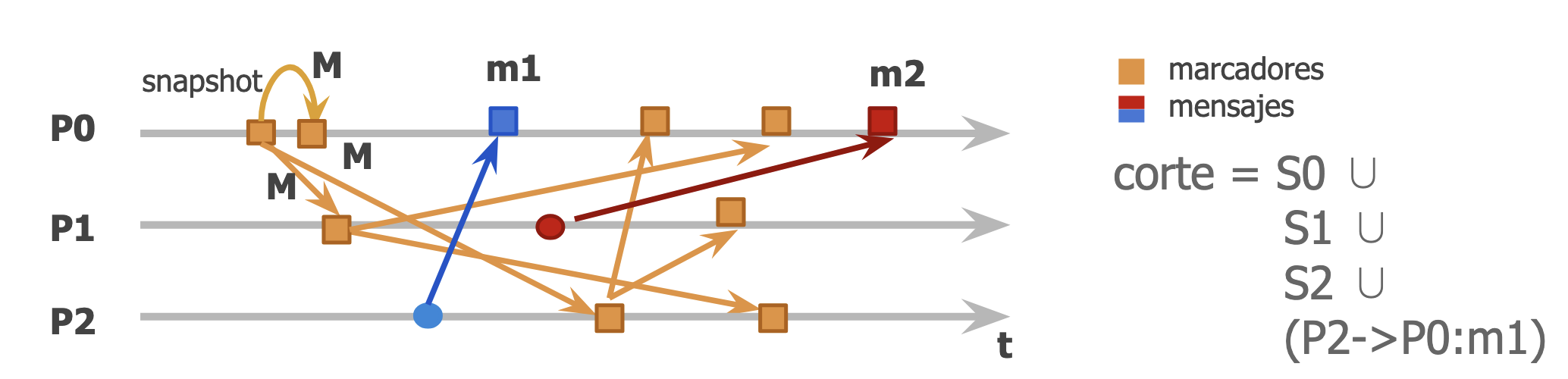
Algoritmo de Chandy & Lamport
Es un algoritmo que permite obtener snapshots (o cortes consistentes), de estados globales en sistemas distribuidos.
El algoritmo toma las siguientes suposiciones:
- Los procesos y canales de comunicación no fallan.
- Los canales son unidireccionales y tienen un orden fifo.
- El grafo de comunicación es fuertemente conexo.
- Cada proceso puede iniciar un snapshot en cualquier momento.
El algoritmo tiene cuatro reglas principales:
- Inicio del algoritmo: Cuando un proceso observer quiere generar un corte, guarda su propio estado y envía un marcador al resto de procesos.
- Primera recepción del marcador: Cuando un proceso recibe un marcador por primera vez de un proceso , envía su propio estado al observer, y comienza a registrar todos los mensajes recibidos del resto de procesos, exceptuando a . Esto se debe a que el proceso ya registro su estado, por lo que debemos ignorar los mensajes siguientes que envíe.
- Siguientes recepciones del marcador: Cuando un proceso vuelve a recibir un marcador del proceso , entonces envía todos los mensajes registrados hasta el momento al observer, y deja de registrar los mensajes recibidos por . Esto se debe a que el proceso ya registro su estado, por lo que debemos ignorar los mensajes siguientes que envíe.
- Fin del algoritmo: Cuando el observer recibe el marcador de cada uno de los otros procesos, da por finalizado el algoritmo.
El corte final contendrá el estado en el que se encontraba cada proceso cuando recibió por primera vez el marcador, y además todos los mensajes enviados por el mismo proceso antes de hacerlo.