El consenso es un procedimiento para un conjunto de procesos distribuidos acuerden en el mismo valor dado un punto de decisión. Implica coordinación y establecer un algoritmo de acuerdo.
Al ser un problema complejo, se suelen tomar suposiciones, por ejemplo:
- Los canales de comunicación son reliables.
- Todos los procesos pueden comunicarse entre sí: no hay particionamiento de redes.
- La única falla a considerar es la caída de un proceso.
- La caída de un proceso no puede ocasionar la caída de otro. Esto no ocurre si los sistemas se encuentran en la misma computadora.
Objetivos
Algunos de los objetivos a lograr son:
- Lograr que un conjunto de procesos pueda realizar ciertas tareas siguiendo una secuencia.
- Permitir la replicación de información.
- Evitar los puntos únicos de fallo.
Algunos de los problemas que se pueden resolver, son:
- Sincronización entre diferentes procesos: un proceso debe esperar a otro para continuar, o se requiere acceso exclusivo a un recurso compartido.
- Elección de un proceso coordinación líder.
- Determinación del valor correcto de una propiedad.
Definición General
Se tienen un conjunto de procesos que desean llegar a un acuerdo:
- Cada proceso comienza en el estado
undecided. - Cada proceso posee una variable de decisión .
- Cada proceso propone un valor .
Luego de haber recibido mensaje de otros procesos, el proceso establece su variable de decisión y cambia su estado a decided.
Se denota como como la cantidad de nodos que pueden fallar bizantina, y con la cantidad de nodos del sistema. Luego la fórmula de quorum, indica la cantidad de nodos necesarios para que el sistema pueda llegar a un consenso. Por ejemplo, si se requiere mayoría: .
Requerimientos
Algunos requerimientos necesarios de los algoritmos de consenso, son:
- Agreement: El valor de la variable de decisión es el mismo en todos los procesos correctos.
- Integrity: Si los procesos correctos propusieron el mismo valor , entonces el valor de su variable de decisión es la misma. Esto implica que no solo se llega a un acuerdo, sino que el acuerdo es correcto.
- Termination: Eventualmente, todos los procesos activos establecen su variable de decisión.
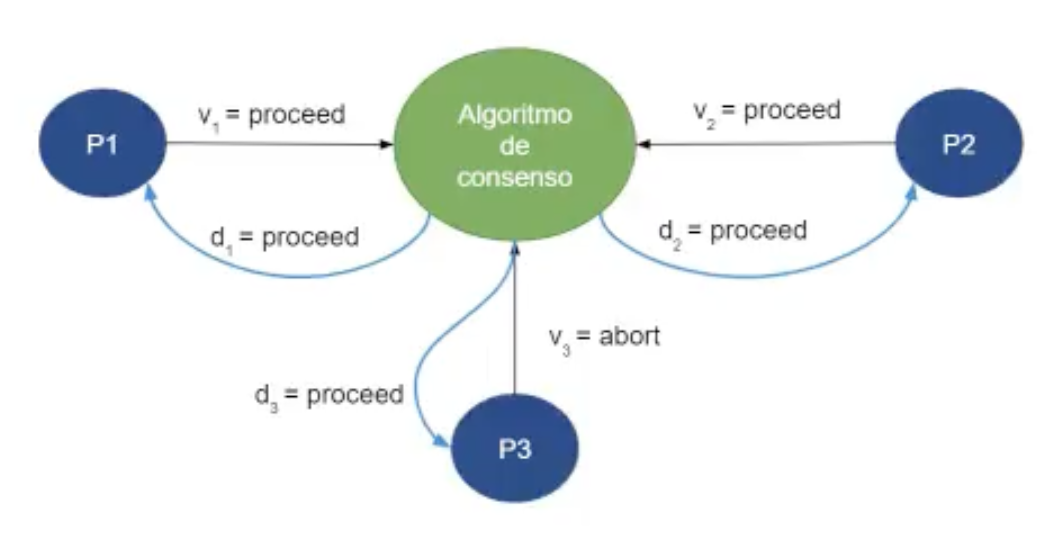
En el gráfico podemos ver como P1 y P2 propusieron el mismo valor proceed, y como son mayoría se conveirte en el valor de la variable de decisión del proceso P3
Algoritmo Sincrónico
Cada proceso tiene la variable state(t) que almacena un conjunto (sin repetidos) con los valores propuestos conocidos para un dado proceso en el instante de tiempo t.
Al iniciar la ronda 1, solo conoceremos nuestro propio valor v.
set state(0) = {}
set state(1) = {v}
En cada ronda, los procesos envían los valores que conoce al resto de procesos (no hace falta enviar un mismo valor dos veces, por lo que una vez que un dato fue enviado, no hace falta enviarlo en las rondas siguientes). Cada proceso recibe los datos del resto de procesos y los almacena.
for each round r, with 1 <= r <= f+1:
broadcast state(r)
set state(r+1) = state(r)
for each process j:
get state from j
set state(r+1) += state from j
Tras f+1 rondas, se aplica una función de agregación sobre el estado, y como la información total es la misma, entonces la decisión será determinística.
decide d = aggregate over state(f+1)
Se necesita una ronda por cada nodo que puede caer (ya que al menos un nodo caído implica que no todos los nodos reciben la misma información). Si se caen nodos, a partir de la ronda la información no cambiará (ya que no podrá caerse ningún nodo más).
La función de agregación puede ser, por ejemplo, el valor mínimo.
Elección de Líder
El algoritmo es genérico y puede ser utilizado para implementar una elección de líder si, por ejemplo,
v_irepresenta el identificador del procesoi, y la función de agregación esmax.
Ejemplo con 3 procesos
Dados 3 procesos, se tienen que poner de acuerdo en un valor. Inicialmente, un proceso tiene el valor , y los otros tienen el valor . Como función de agregación, se utiliza el minimo.
Con f=0, el sistema funciona siempre que no se caiga ningún nodo. Si queremos que sea tolerante a caídas de nodos, entonces debemos agregar más rondas de redundancia.

Vemos que si hubiese una sola ronda, entonces no se llegaría al consenso debido a que al finalizar la primera ronda, los procesos 2,3 tienen un estado distinto. Luego de la siguiente ronda, ya el estado es el mismo, por lo que el valor final también lo será.